Maritime Robotics and Instrumentation Lab (MRIL)
The MRIL is located on the Highfield Campus (Building 9 Room 1047). Request access to the platforms and facilities detailed below through using this form
Ocean-Going Platforms and Sensors

Smarty200 - 200m depth-rated modified Sparus II AUV (Iqua robotics) equipped with seafloor imaging and laser scanning (Voyis RECON), DVL/INS (Sonardyne Sprintnav-mini), USBL (Sonardyne AVTrack Nano) and surface iridium. Platform endurance ~10h. Dimensions L2.0 x 0.3 x 0.3, weight 70kg. Download Specification
Driftcam “Floaty McFloatface” - 200m depth rated Lagrangian Imaging Floats capable of strobe illuminated stereo-photogrametry and constant altitude keeping over rugged terrains and dedicated software to predict drifts based on global current estimates. Equipped with USBL (Sonardyne AVTrack Nano), and iridium on separate trickle charged power source. Platform endurance ~10day with iridium transmission up to 1 year. Dimensions L1.2 x 0.3 x 1.2, weight 70kg
Ecosub5μ x 5 - 500m depth rated Micro AUVs. Download specification
Hyball2020 - Modified Hyball ROV with dual camera (downward and diagonal down) and optional manipulator. Modified with modern electronics, including onboard processing and topside interface via ethernet and controll using gaming controller. Powered using standard 13 amp wall socket via 300m tether.
CCat3 - ASV (L3 Harris, formerly ASV Global), 3m long ASV weight 320kg. 3.5knot cruising speed and 6-8h endurance. Download specification
BioCam x 2: 4000m depth rated high resolution stereo camera system with dual LED strobes and dual laser s for seafloor 3d visual mapping. Developed as part of the NERC Oceanids programme together with Sonardyne International Ltd. Main camera unit dimension [LxBxH] 50x15x31.2cm, weight 33kg. Previously mounted on Autosub6000 and ALR6000 (a.k.a. Boaty Mcboatface). Download specification
Micro-ranger: USBL topside (Sonardyne) for tracking submersibles at up to 995m range. Download specification
Platforms for Education
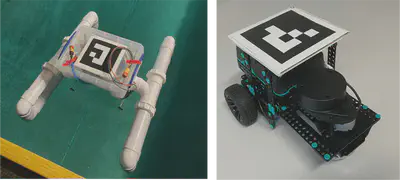
SmartCat x 5: Small differential thrust actuated catamarans used for teaching on “Maritime Robotics”. Equipped with 3 axis IMU and parsing position information using Qualysis and AR tag location feeds, endurance 2h.
WheelySmart x 5: Small wheeled robots used for teaching on “Intelligent Mobile Robotics”. Equipped with 3 axis IMU and parsing position information using AR tag location feeds. Equipped with 2d lidar for use in SLAM, endurance 3h.
Lab Facilities

Testing & calibration tank 4.3x2.5x1.4m with side viewing ports 1 tonne gantry crane
Clean room 3x2m for electronics and optical assembly and planned upgrade for laser interlock
2 up-box 3d printers for rapid prototyping
Motion capture systems for on-land and in-water robotic experiments
Two reconfigurable working bays with storage modules
Direct car access with garage
Chemicals and hazardous materials storage cabinet