BioCam
It was developed as part of the NERC Oceanids programme together with Sonardyne International Ltd. The main camera unit dimensions are [LxBxH] 50x15x31.2cm, weighing 33kg. The system has been mounted on Autosub6000 and ALR6000 (a.k.a. Boaty Mcboatface) on multiple science and infrastructure inspection missions. Download specification
In the field
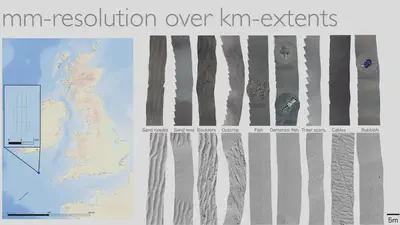
BioCam leverage advances in lighting and high-sensitivity detector technology to obtain colour images from relatively high altitudes of up to 10 m, allowing faster-moving vehicles to be used and larger swaths of data to be collected. This allows sub-centimetre resolution 3D visual maps to be generated over multi-hectare region spatial scales that are relevant to many monitoring and infrastructure planning applications.
In addition to gathering data, BioCam also looks at scalable methods to reconstruct and interpret large volumes of seafloor imagery to generate insights on timescales relevent to oceanic expeditions.

We have demonstrated over-horizon awareness of image quality metrics and automatically generated observation summaries over low-bandwidth satellite links at the end of each mission. This allows land-based operators to make informed planning decisions during long-endurance surveys, as demonstrated during a 22 day shore launched survey of dicommisioned offshore oil and gas infrastructure during NERC INSITE program and EU H2020 TechOceanS (101000858).
Examples of BioCam data from BoatyMcBoatface deployments in Haig Fras above, and below, observation of a decommissioned oil well during the 1000km, 20day ship-free shore launched IN-SITE trials.

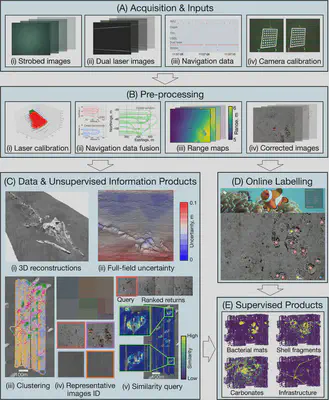
Overview of our processing pipeline to general robust seafloor reconstructions and rapid, reliable data interpretation.
Cruises
TechOceanS Plocan ALR-BioCam shore-launched missions for demonstrating remote awareness over ultra-low bandwidth satellite communication.
DEFRA MPA Monitoring ALR-BioCam shore-launched missions for monitoing North Sea MPAs.
INSTITE AT-SEA ALR-BioCam Shore-launched ship-free 21 day, 1013km traverse survey of NW Hutton and Miller decommissioned offshore oil and gas infrastructure. PI Jones (NOC).
DY152 ALR-BioCam technical trials at Haig Fras and Southwest Deeps to demonstrate ship-free, over horizon mission retasking and image data quality control concepts. PI Phillips (NOC).
DY108/109 Cold-Water-Coral mapping at Darwin Mounds using the AUV Autosub6000. PIs Thornton (UoS), Huveenne (NOC).
SSK18-01 Coral mapping off Sesoko Island, Okinawa using the AUV TUNA-SAND. PIs Thornton (UoS), Harii (Uni. Ryukyus), Nishida (Kyutech). The survey took place 2 days after a direct strike from Typhoon Trami.
FK180731 Adaptive Robotics at Barkley Canyon & Hydrate Ridge, off the R/V Falkor of the Schmidt Ocean Institute. Lead by Thornton (UoS).
SSK17-01 Coral mapping off Sesoko Island, Okinawa using the AUV TUNA-SAND. PIs Thornton (UoS), Maki (UTokyo), Harii (Uni. Ryukyus) Pizarro (U, Sydney), Nishida (Kyutech). Supported by the Daiwa Foundation.
Funding
This project is funded by NERC (NE/P020887/1) under the Oceanids Marine Sensor Capital program, 2017 to 2021. BioCam is part of the National Marine Facilities Technology Roadmap, and forms the basis for ship-free monitoring of offshore oil and gas infrastructure under AT-SEA (Autonomous Techniques for anthropogenic Structure Ecological Assessment, NE/T010592/1) as part of the NERC INSITE program from 2021 to 2024 where BioCam will be deployed from the National Oceanography Centre’s Boaty McBoaface. We are also part of the team delivering the EU H2020 TechOceanS (101000858) project from 2020 to 2024, which developed sensing technologies for ship-free ocean sensing. Following these projects, we took part in the Innovate UK OASIS project (10110715) from 2024 to 2025 working with Voyis Imaging and the NOC, and the BioCam will be used as part of the NERC C-Floor project (NE/Z503885/1) from 2024-2028.