Falkor Back Ashore Panel: 19/05/2023
Prof Thornton participated in the Schmidt Ocean Institute’s Back Ashore online event as a panellist alongside
- Prof. Joao Sousa - University of Porto
- Dr. David Gruber - CUNY Baruch College
- Dr. Kakani Katija - Monterey Bay Aquarium Research Institute
- Dr. John Burns - Bigelow Laboratory for Ocean Sciences
The session talked about technologies that were deployed on board the Falkor research vessel, what’s happened since, computer games and communication of science/technology to wider audiences.
Here’s a screenshot of the panellists
DOOS EOV Panel: 10/05/2023
Adrian Bodenmann gave a talk on long-range over-horizon seafloor mapping at the DOOS EOV panel at MBARI
Underwater Technology Forum0: 21/04/2023
Prof. Thornton gave a talk at the Underwater Technology Forum0 on recent developments in long-range seafloor mapping methods.
Ocean Buisiness 2023: 18-20th 04/2023
Several group members were on the SMMI stand at Ocean Business interacting with the industry.
SOTSEF: Science and Engineering Festival - 18/03/2023
Great day at Southampton University’s SOTSEF Science and Engineering festival.
Over 5000 guests in total and it felt like it down at the towing tank where Smarty200 and BioCam were on display!


Inspection of subsea cables using AUVs - 22/02/2023
Keynote lecture at the 145th Robotics Society of Japan Seminar - 12/12/2022
Prof Thornton will be giving a Keynote at the 145th Robotics Society of Japan Seminar (16:50-17:50 JST):
Title: Deep in the 21st century already. Where should we be taking marine robotics?
Abstract: More than three decades have passed since robots first established themselves in the marine sector. It’s fair to say they have long graduated from being the ’new kid on the block’, and have gained acceptance as a ‘veteran workhorse’ used by academic, government and commercial sectors. Modern society’s expectations now change the line of questioning our research community needs to engage with from “Can we use marine robots?” to “How should we use marine robots?”. In this talk, I will introduce examples of recent developments in marine robotics technology and operational vision, and consider the challenges and choices we face as a community to address mid-21st century societal priorities.
Here are some of the visualisations generated to illustrate AUV/USV development trends.
AT-SEA press release - 09/11/2022
Short article on the success of the AT-SEA BIOCAM-ALR mission.
https://www.southampton.ac.uk/news/2022/11/biocam-atsea-mission.page
MATS2022 - 09/11/2022
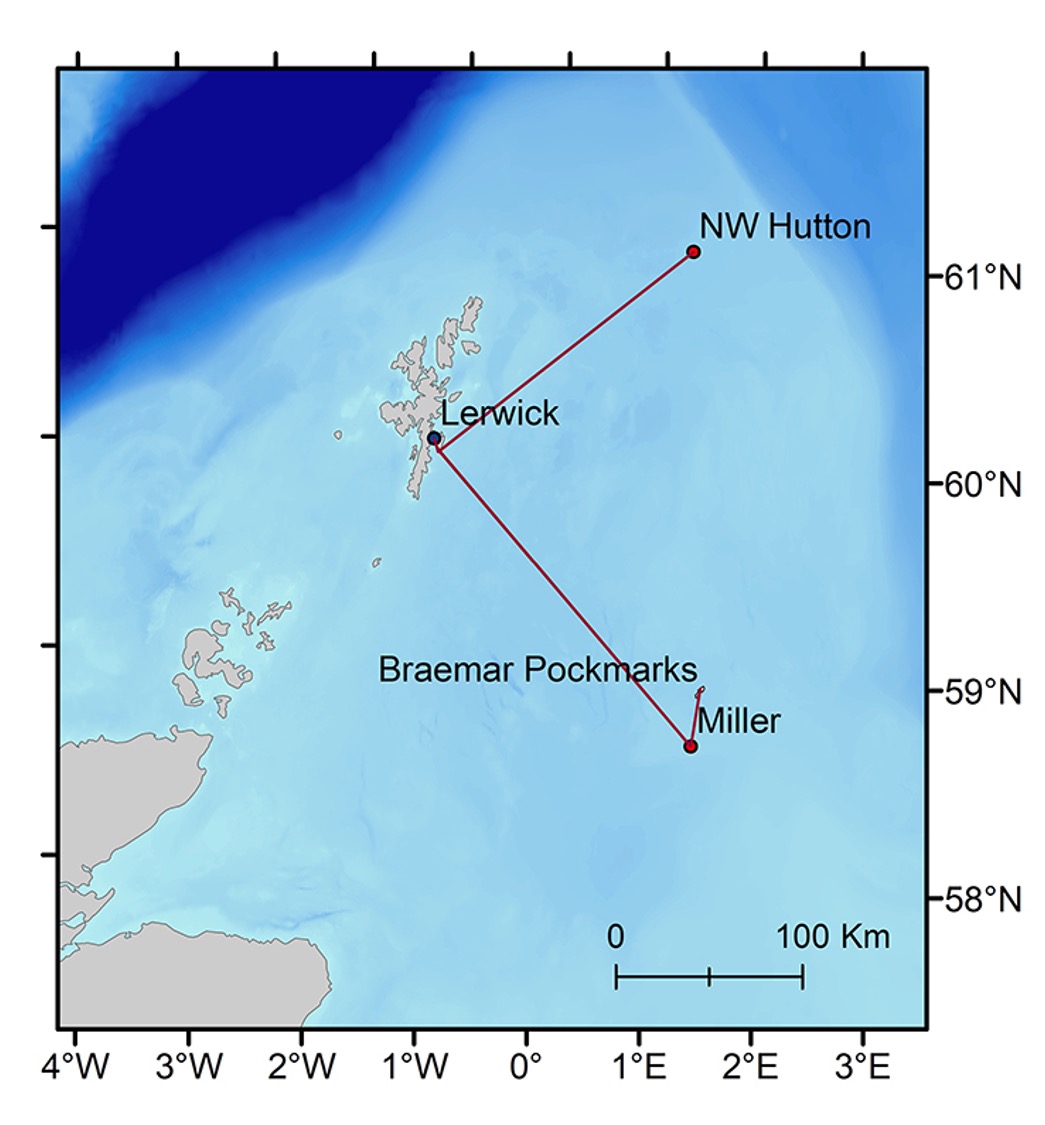
A fantastic first day at MATS2022 with members of our group on the SMMI stand. On 10th Nov (Day 2) Miquel Massot and Adrian Bodenmann will be presenting results from surveys in Studland bay with Smarty200, and also the BioCam surveys during DY152 and also some preliminary results from the IN-SITE AT-SEA survey of North West Hutton, Miller and the Braer Pockmarks.


Smarty200 at Oceans 2022 - 18/10/2022
Dr Miquel Massot and Harry Redfern are out in the US presenting the work of our group. Here is a picture of Miquel talking about Smarty200 with an integrated Voyis camera and laser scanning system and Sonardyne Sprintnav-Mini Avtrack-nano USBL and modem. Harry will be talking about the development of a passively pre-tensioned variable buoyancy engine for fail-safe surfacing.


Prof. Thornton awarded at IEEE/AUV2022 - 20/09/2022
Prof. Thornton was awarded the IEEE OES AUV2022 symposium mid-career “rising star” award.

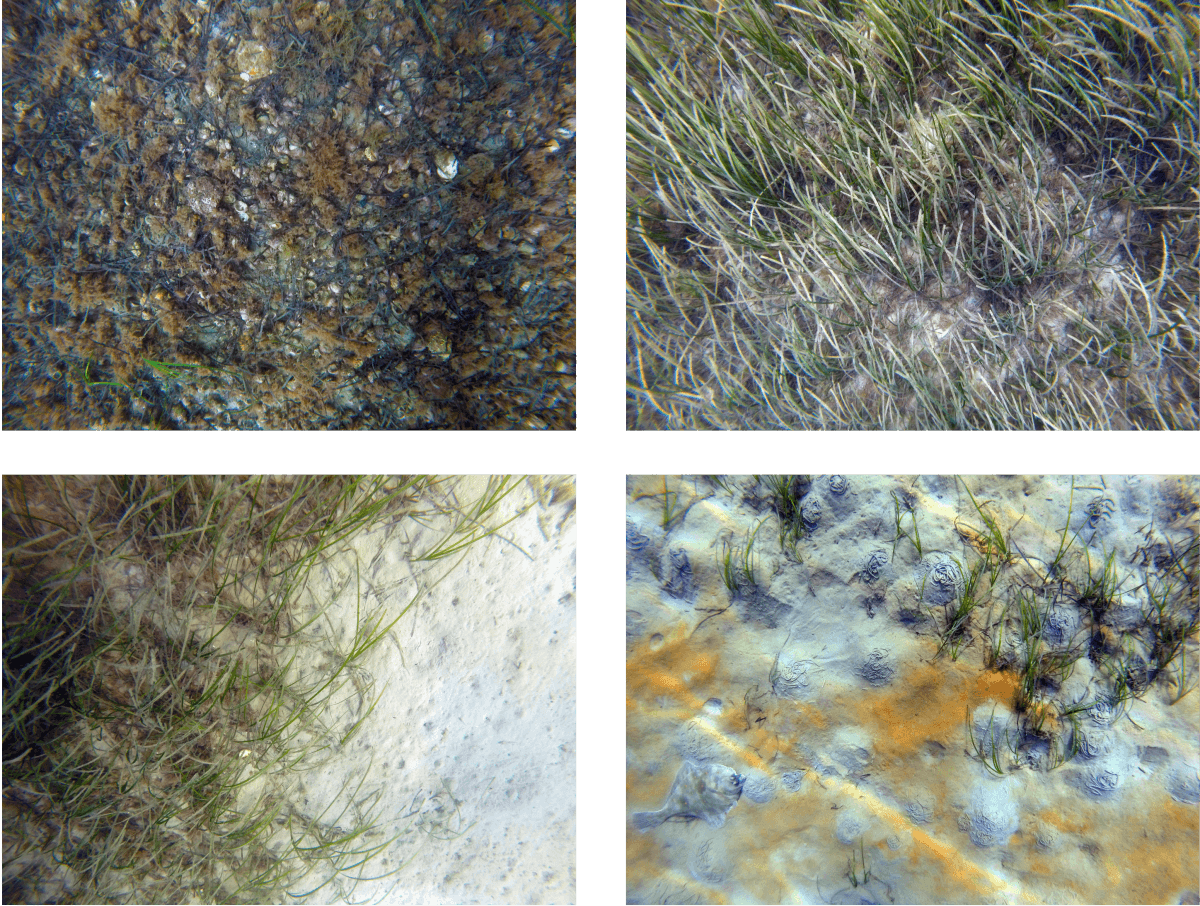
Smarty200 in Studland bay 2 - 21/09/2022-22/09/2022
Smarty was deployed in Studland Bay to monitor seagrass. The robot repeated the survey transects we did in July, and comparing the two sets of image data will allow us to quantify changes in seagrass distribution.
Examples of some of the images Smarty200 took during the survey.
Ship-free monitoring of decommissioned offshore oil and gas infrastructure - 15/09/2022 to 10/10/2022
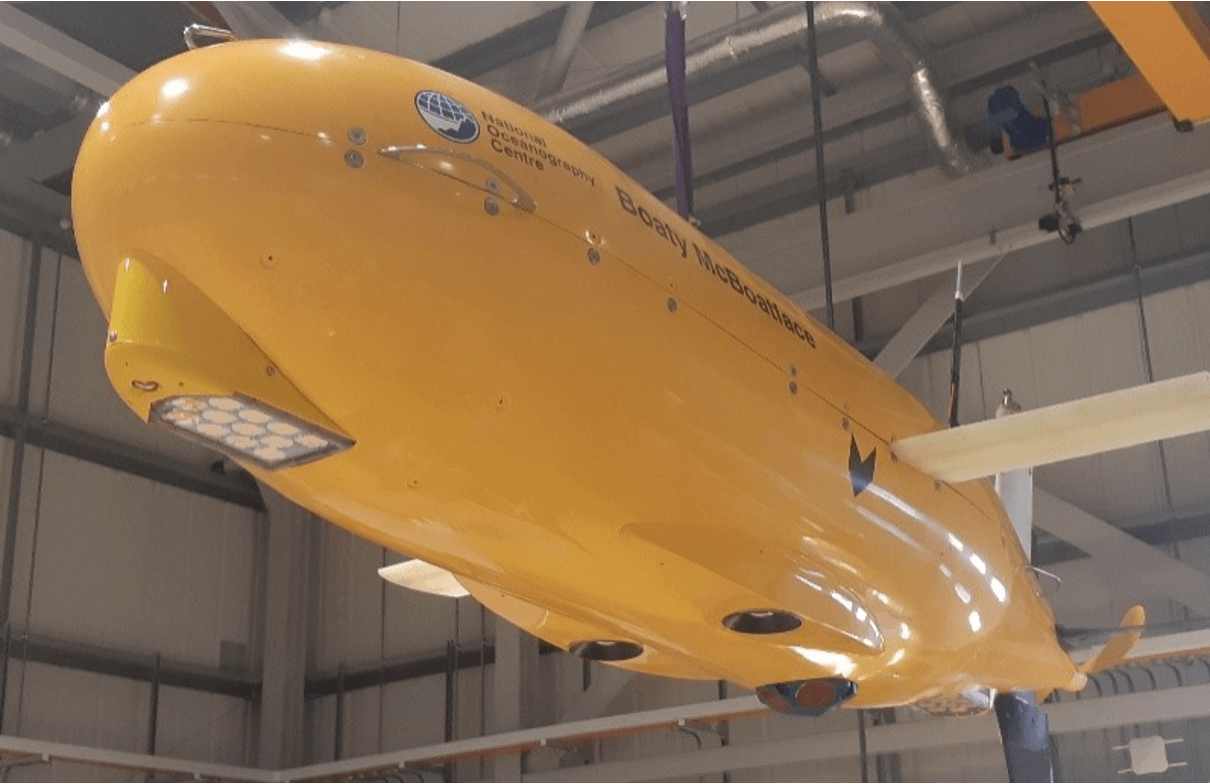
Our BioCam mapping system will be used by the NOC’s Boaty McBoatface AUV to survey the seafloor around decommissioned offshore oil and gas infrastructure. The operations will be ‘ship-free’, taking advantage of Boaty McBoatface’s large range and endurance, and the proven reliability of the BioCam-Boaty McBoatface setup. The AUV will be launched and recovered from shore, and spend almost 10 days gathering seafloor images and 3d data. The total distance it travels will be close to 1000km. Being able to conduct such operations without a ship significantly reduces both the cost and CO2 emissions of marine surveys.
SMARTY200 surveying Seagrass around eco-moorings - 15/07/2022-19/07/2022
Blair and Miquel have been out in Studland Bay deploying SMARTY200 from the Rocket. The 2 person operation (+Skipper) has successfully gathered tens of thousands of georeferenced images showing seagrass distribution around the newly installed eco-moorings in the bay. A total of eight dives were performed on SMARTY200’s maiden voyage and the data will help our science collaborators and partners at the National Trust, Dorset Coast Forum and Seahorse Trust evidence the effectiveness of the moorings at protecting the seagrass meadows. Here is a short video summary of the operations.


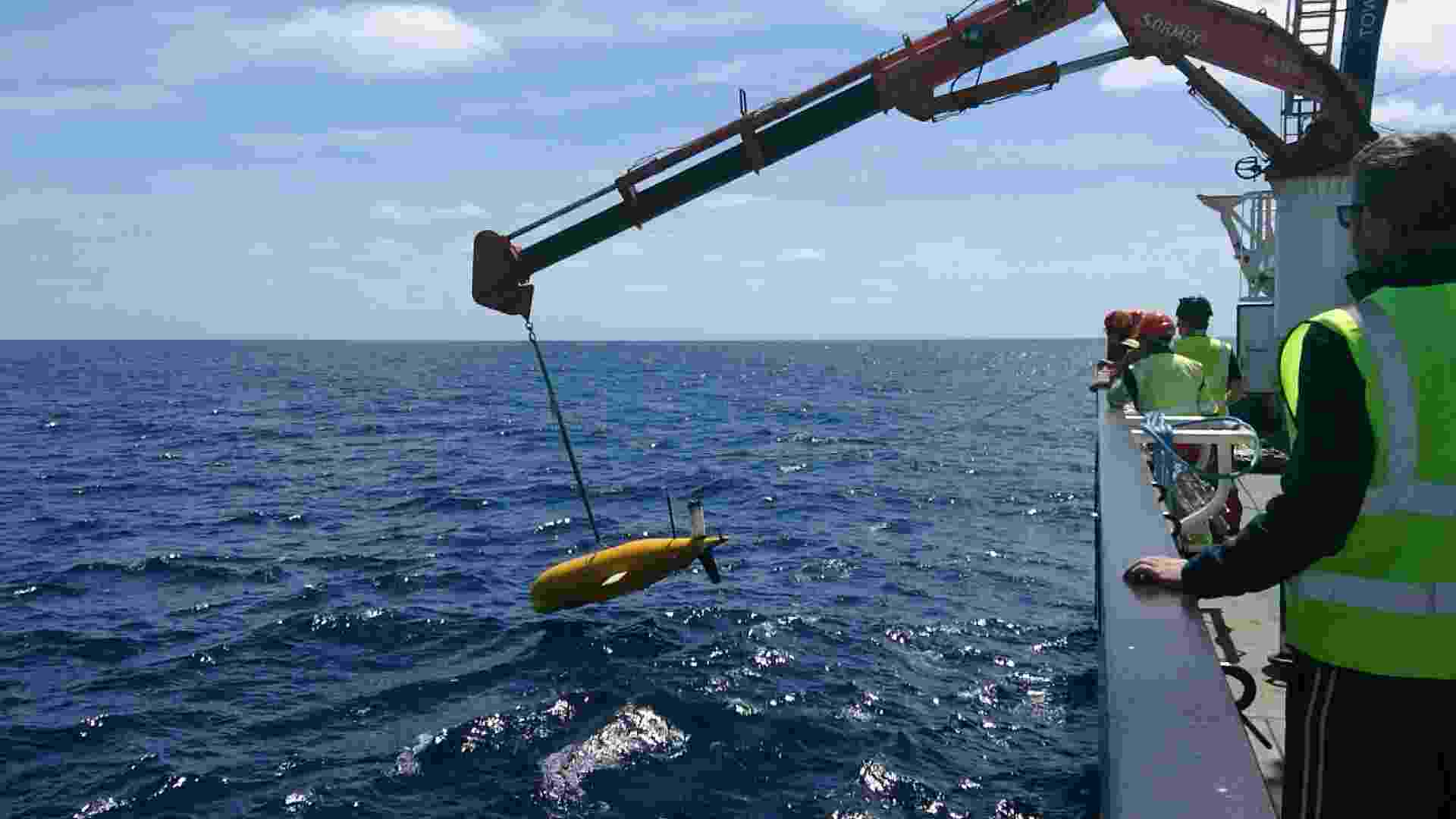
BioCam on DY152 - 10/07/2022-23/07/2022
Adrian and Jose are with the MARS team from the NOC deploying a BioCam-equipped Autosub Long-Range (a.k.a Boaty McBoatface) from the RSS Discovery. The cruise aims to survey two sites in Haig Fras and the Whittard Canyon to demonstrate mature mapping capabilities and also over-the-horizon / ship-free multiday survey capabilities in preparation for IN-SITE AT-SEA. A low res photo of operations sent via satellite of ALR-BIOCAM being deployed - it will operate for several days while the ship goes elsewhere to do other things!
European Subsea Cables Association (ESCA) Plenary 2022 - 24/05/2022
Prof Thornton will be giving a plenary on ‘Re-imagining Subsea imaging’ at the ESCA’s 2022 meeting. ESCA is an organisation of submarine cable owners, operators and suppliers and is primarily aimed at promoting marine safety and protecting cable installations in European and surrounding waters.
Deep Ocean Observing Strategy (DOOS) panel - 04/05/2022
Prof Thornton was invited to present advances on seafloor visual survey and automated data interpretation technologies at a DOOS panel that focuses on observations in the deep ocean to address the grand societal issues of climate change prediction and adaptation, ecosystem conservation, and sustainable management in the deep ocean. The goal of the DOOS project is the creation of a common statement of requirements and initial strategy for sustained global deep ocean observations; considering all Essential Ocean Variables, regions, and technologies so as to extract high impact, feasible, and fit-for-purpose actions for the next 5-10 years.
Invited seminar at Redone-technologies - 27/04/2022
Prof Thornton gave a seminar on seafloor visual and acoustic sensing technologies for robotic exploration at Redone-technologies.
7th Underwater Technology Forum Zero - 22/04/2022
Prof Thornton will be giving a talk on remote sensing technologies for manganese mineral deposit surveys on the high-seas.
EOOS Technology Forum 2022 - 23/03/2022
Prof Thornton will be a panellist at the EOOS Technology Forum 2022: Thinking ahead: The technology of the science we will need for the ocean we want.
How do we achieve a distributed, embedded and multiparameter ocean network?
Alongside:
- Heinz Schelwat (CEO and President, Sea and Sun Technology GmbH)
- Justin Manley (President, Marine Technology Society)
- Dariia Atamanchuk (Researcher, Dalhousie University)
- Sara Iverson (Scientific Director, Ocean Tracking Network, Dalhousie University)
- Johannes Post (CEO, Deepsea Mining Alliance)
- Blair Thornton (Professor, University of Southampton)
https://www.eoos-ocean.eu/events/eoos-technology-forum-2022-workshop/
Supplement to Oceanography - 07/01/2022
Open access article on Visualizing multi-hectare seafloor habitats with BioCam featured in the Supplement to Oceanography 34 2021.

Grassmap wrap - 20/09/2021
Several successful dives by the University of Southampton’s “FloatyMcFloatface” Lagrangian Imaging Float, and the University of the Balearic Island’s Turbot Sparus II AUV.

Grassmap! Live stream Ship2shore - 19/09/2021
Dr Miquel Massot and Jose Cappelletto live streaming with Eurofleets+ from the RV SOCIB from Mallorca. A great quote is that “data is never born on a hard drive”.


Grassmap! Eurofleets+ collaborative cruise with Uni. Balearic Islands and Uni. Sydney - 14/09/2021
Dr Miquel Massot and Jose Cappelletto from our team are out at sea leading an international group of researchers from the University of Southampton, University of the Balearic Island (UIB) Systems, Robotics and Vision Group and University of Sydney (USydney) Australian Centre for Field Robotics Marine Group. They plan to deploy the UIB Sparus II and UoS FloatyMcFloatface to perform seafloor visual mapping using very different observation strategies.


Sparus II will gather data along machine-generated trajectories designed to optimally sample different types of “habitat”, based on the work of Jackson Shields from USydney (Feature Space Exploration For Planning Initial Benthic AUV Surveys).
FloatyMcFloatface, or DriftCam, on the other hand, will just go with the flow, drifting along on underwater currents while keeping a fixed altitude off the seafloor to gather high-quality images. The exact trajectories won’t be controlled, but the deployment locations of Floaty will be determined based on sea current predictions for the deployment area.
The cruise is part of the Eurofleets+ Grassmap campaign, funded by the EU Eurofleets Transnational Access Program, and it has been picked up by the local news.
Past news
Loch Ness Trials 2021- 24/07/21
Final preparations for the Oceanids Cruise JC220. BioCam on the National Oceanography Centre’s ALR (a.k.a. BoatyMcBoatFace) in Loch Ness. Great job by the NOC MARS team for a very neat and tidy integration into ALR.


GeoHab 2021- 05/05/21
Some members of our team will be giving talks at GeoHab 2021
Emma Curtis: Investigating inter-user variability in seabed image annotation and its impact on cold-water coral monitoring programmes
Takaki Yamada: Metadata Enhanced Feature Learning for Efficient Interpretation of AUV Gathered Seafloor Visual Imagery
You can register to attend the online workshop here (it’s free). Times in the program are in Central European Time (CET) so be careful not to mess up (especially Emma and Takaki)!
Satellite Applications for the Future of our Seas - 23/03/21
Prof. Thornton giving a talk at an event organised by EM3 LEP, Hampshire County Council, South Coast Centre of Excellence in Satellite Applications, University of Surrey, Oxford Innovation and supported by University of Southampton and the KTN UK. This event brings together satellite applications and marine & maritime communities. Event site here.

Article on Fukushima Hot Particles published - 11/03/21
Our paper on “Analysis of radioactive cesium-enriched particles and measurement of their distribution in marine sediment near Fukushima Daiichi nuclear power plant”, was published in the Journal of Nuclear Science and Technology, DOI:10.1080/00223131.2021.1879688
https://www.southampton.ac.uk/smmi/news/2021/03/subsea-robotic-mapping.page
Keynote at Underwater Technology 2021 - 02/03/21
Prof. Thornton gave a keynote presentation at Underwater Technology 2021: http://www.ut2021.org/
Dr Takahashi was awarded a runner-up young researcher prize for her research video about RamaCam, a joint UK and Japan project.
Schmidt Ocean Institute Science Symposium 2021 “Technology at Sea” - 18/02/21
We will be discussing future ocean technology at the SOI Science Symposium (virtual, register here) as part of an expert panel alongside: Prof. Ralph Rayner, Sonardyne International Mr. Brett Phaneuf, Managing Director, Mayflower Autonomous Ship Dr. Chris Zappa, Columbia University Dr. Ivona Cetinic, NASA Dr. Kakani Katija, Monterey Bay Aquarium Research Institute
Recording of the event here and session embedded below
Institute of Maritime Law: Autonomous Ship Policy, Regulation and Liability, 24/2/21:
Robert Veal (Lecturer in Law, UoS, IML), Dr Katrina Kemp (Autonomy Technical Specialist, UK Maritime and Coastguard Agency), and James M. Turner QC (Barrister and Arbitrator, Quadrant Chambers) discussing:
- The regulatory compliance challenges presented by IMO and domestic shipping regulation
- An update on the work underway within national and international maritime regulatory bodies
- Product liability risks in the development of autonomous technology for ships
- Shipowner liability issues with autonomous ship operations
- The enforcement of maritime claims involving autonomous vessels
Invited talk at Catch the next wave - Oceanology International 2020 19/11/20:
We are lucky to be part of a fantastic lineup at Oceanology International (Online, 14:00-16:05 19/11/20)
Re-imagining Seafloor Imaging, Blair Thornton
UK Autonomous Field Robotics Facility 9/11/20:
We will be running an online event to share and gain feedback on ideas for a UK Autonomous Field Robotics Facility.
Article in Offshore Engineering Magazine and Marine Technology Reporter 21/10/20: Seabed Imaging Re-Imagined, and Marine Technology Reporter Global Oceans: Oceans 2020 Panel: Advances in Oceanographic Research and Technology Development at Sea - 7/10/20
Introduction of the #AdaptiveRobotics expedition at Global Oceans for a panel session put together by the Schmidt Ocean Institute. This was followed by a panel discussion and questions from the audience of ~100 experts in Ocean Engineering.
Joint article with Sonardyne published in the Journal of Ocean Technology - 28/09/20
Open access essay describing the biocam project and collaboration with Sonardyne.
Resolution and Coverage - The Best of Both Worlds in the BioCam 3D Visual Mapping Project.
New project awarded - NERC INSITE - 02/06/20
Our team will be looking into the use of seafloor imaging technology to moniter the impact of artificial structures on the marine ecosystem, as part of NERC’s INSITE program.
https://www.insitenorthsea.org/blog/2020/nerc-research-grants-for-insite-projects-announced/
Join CMEE - 20/05/20
Want to help engineer the future? Look for opportunities to join CMEE https://www.engineerthefuture.co.uk/
SMMI-IMAREST film - 20/02/20
Watch the extended feature on SMMI activities for IMaREST Our Oceans Our Future
Invited talk at Underwater Intervention 2020- 01/02/20
Dr Thornton will be talking about using AI for rapid understanding of seafloor maps during a special session on emerging technologies.
When: February 5 2020 Time: 12:00-16:00 Where: New Orleans, USA
Largest continuous region of seafloor ever visually mapped in UK waters - 18/09/19
A team from the University of Southampton has successfully obtained the largest continuous visual map of the seafloor ever obtained in UK waters during a currently ongoing expedition to the Darwin Mounds. The expedition led by co-chief scientists Blair Thornton of the University of Southampton and Veerle Huvenne of the National Oceanography Centre (NOC), deployed underwater robots to map cold-water-coral mounds at a depth of 1000m in a Marine Protected Area (MPA).
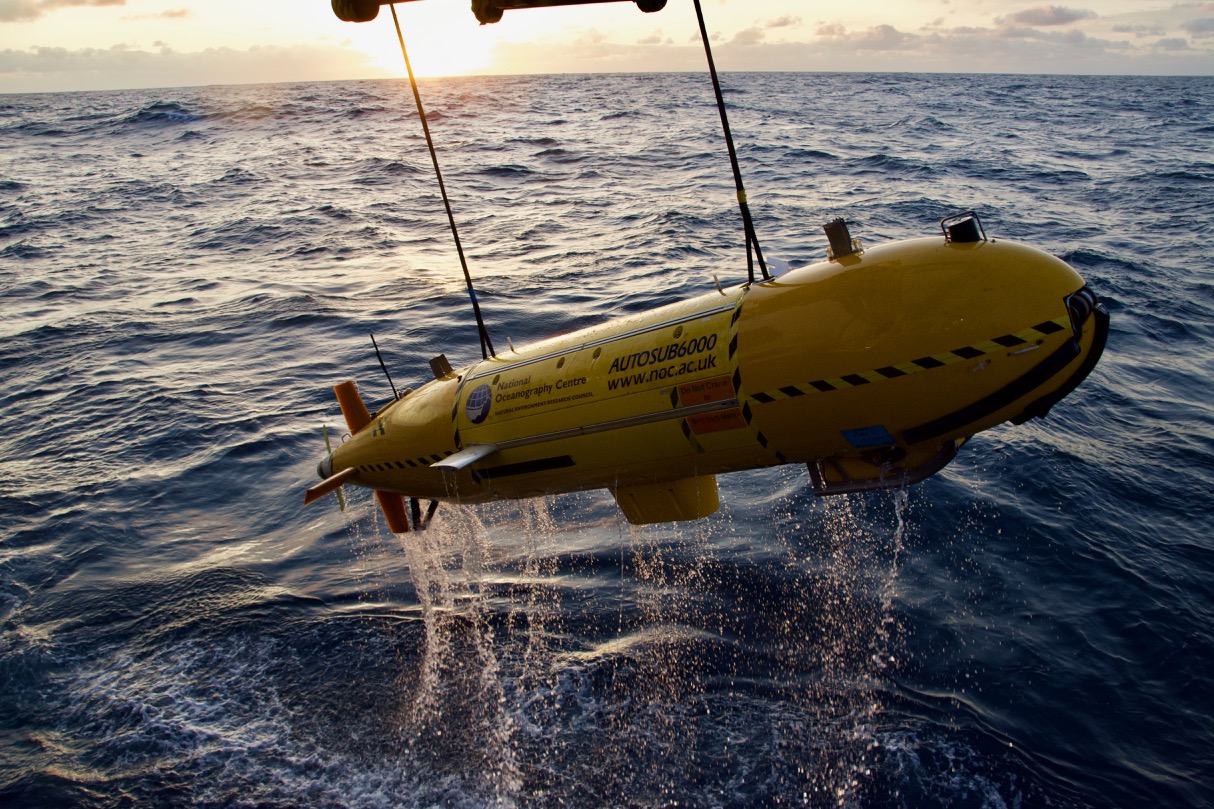
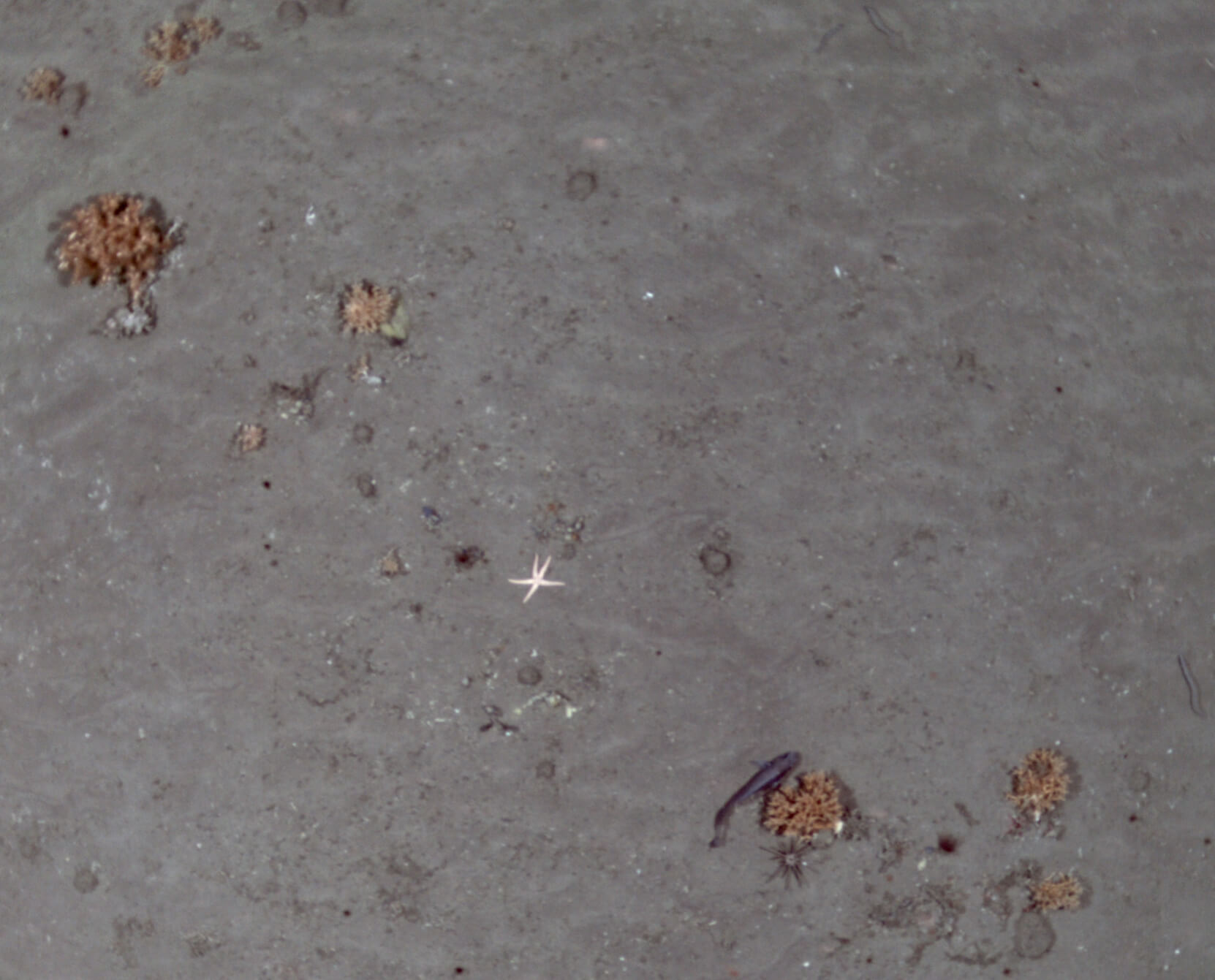
(Left) BioCam fitted on the underside of the underwater robot Autosub 6000 as it is recovered from the ocean after a successful mission (Right) An image of the seafloor taken at 1000m depth showing diverse species of animals living amongst coral
The autonomous robot, Autosub6000 of the NOC, was equipped with BioCam, a newly developed deep-sea 3D imaging system developed by the University of Southampton under the Natural Environment Research Council’s OCEANIDS Marine Sensor Capital program. During its first 24-hour deployment, BioCam was able to visually map the seafloor at 40 times the rate of conventional imaging systems, covering approximately 50 times the area of Wembley stadium’s football pitch. The example below shows one of the 650,000 images taken during the dive, showing diverse species of deep-sea life sheltering amongst the corals. BioCam also discovered a whale carcass more than 8 metres in length on the seafloor just a few hundred metres from a coral mound.
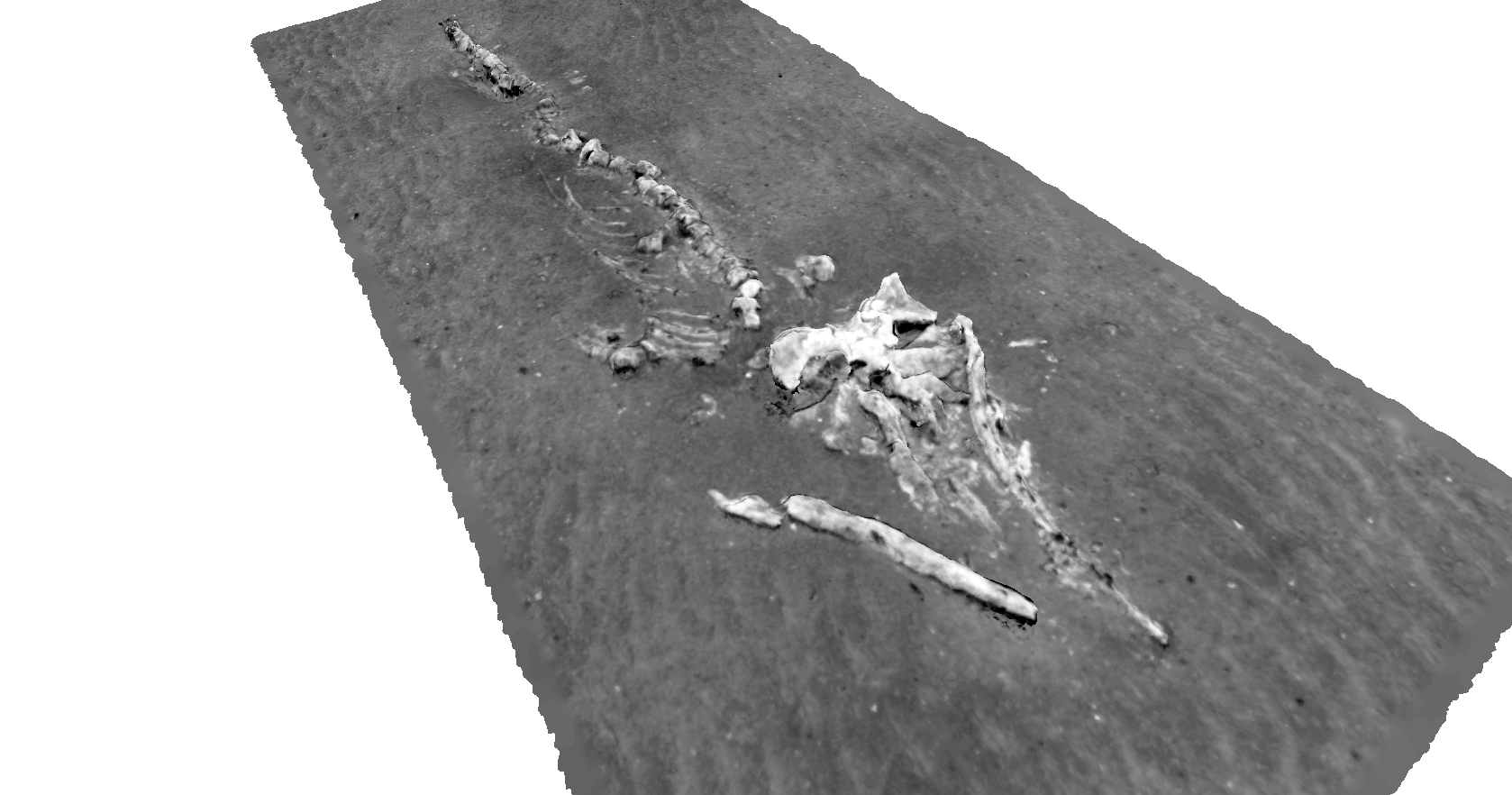
A 3D image reconstruction generated using BioCam showing an 8m long whale carcass that is sandwiched between two large coral mounds.
Blair Thornton, Associate Professor of Marine Autonomy at the University of Southampton says, “The large area and high level of detail in the visual maps BioCam collects can help scientists recognise patterns and features on the seafloor that would otherwise go unnoticed, allowing ecologists to compare sites and document changes over time at much larger scales than previously possible.”
He continues, “It is fantastic that the system delivered results from the word go. This was only possible because of a huge team effort, with staff and students at the University of Southampton, local industries, and the MARS team at the NOC working hard together to develop BioCam and integrate it into the Autosub 6000. Huge credit also goes to the ship’s crew for safely deploying and recovering the system in less than ideal sea states.”
Veerle Huvenne, Team Leader for Seafloor and Habitat Mapping at the National Oceanography Centre explains “Typically, scientists map out large-scale spatial patterns in ecology by inferring relationships between sonar maps and short transects of visual imagery (photographs or video). BioCam’s ability to continuously image areas in 3D over tens to hundreds of hectares gives us the ability to directly observe patterns over entire habitats. This is a powerful new tool for scientists to better understand these fragile environments”.
Hayley Hinchen, Marine Habitats Monitoring Manager at the Joint Nature Conservation Committee says, “The data BioCam collects could support marine conservation by providing vital evidence at a large scale about how effective measures like marine protected areas are at conserving our environment, especially in fragile, complex habitats that can’t be physically sampled. The evidence gathered could help us understand how damaged areas of the seafloor recover with time in protected sites like the Darwin Mounds”
More information about BioCam can be found at the following website - https://oceanperception.com/research/biocam
Regular updates about the current expedition are posted on - www.projects.noc.ac.uk/class/blog
The engineers (bottom left to top right): David Stanley, Takaki Yamada, Blair Thornton, Jose Cappelletto, Adrian Bodenmann, Miquel Massot Campos (UoS) Richard Austin-Berry, Phil Bagley, Rachel Marlow, Eoin O Hobain, Owain Shepherd (MARS, NOC)
Invited seminar at Marum
Dr Thornton will be talking about using AI for rapid understanding of seafloor maps at the Marum seminar series
When: January 27 2020 Time: 13:15-14:15
https://www.marum.de/Termine/Blair-Thornton.html
Oceanology International 2019
Dr Thornton will be talking about Robotics and AI at Oceanology International 2019 in San Diego on their panel “Celebrating 50 years of Oceanology International”.
When: February 27 2019 Time: 09:45-11:45 Where: Show Floor Theater Cost: Free to attend
Event overview: Join us as we commemorate the past 50 years of Oceanology International! On the final show day, we will have 6 leaders from the ocean science and technology community sharing their thoughts on the most significant advancements they witnessed through each of the last five decades. Talks will range from manned exploration and the emergence of ROVs to the development of autonomous technologies and robotics that we see today. The celebration will close with a look into the next 50 years including perspectives from some leading specialists in machine learning and artificial intelligence.
Invited talk at Gardline Ltd. “Science Cafe”
Adrian Bodenmann will be talking about “Whole site multi-resolution photogrammetric surveys of deep-sea vents and cold seeps” at Gardline Ltd’s science cafe.
When: Friday, March 1 2019 Time: 09:00-17:00 Where: Gardline Limited, Great Yarmouth
There are many applications in marine science and monitoring that require high-resolution images of the seafloor to be obtained. However, the resolution of underwater observations is often at a trade-off with the extent over which they can be made, and this limits their usefulness in non-uniform seafloor environments where the distribution of features varies over spatial scales much larger than the footprint that can be observed, for example in a single image frame. This talk will describe recent efforts to address scale relevance in seafloor imaging applications by using autonomous underwater vehicles instrumented with systems that can image the seafloor from different altitudes, and build multi-hectare 3D visual reconstructions of the seafloor with resolutions with sufficiently high resolution where needed. This allows continuous wide-area, multi-resolution 3D reconstructions of the seafloor to be generated, allowing patterns to be explored and interpreted over a large range of spatial scales that would not otherwise be possible. This approach will be described by giving examples of data recently obtained in deep-sea hydrothermal vent and gas hydrate fields.